Los motores dc son componentes electromecánicos esenciales en una increíblemente amplia gama de aplicaciones, desde los motores para arduino en proyectos de robótica y automatización hasta los motores de juguete donde comprar que dan vida a los juguetes infantiles y los motores de dc que accionan equipos industriales complejos. Su capacidad para convertir energía eléctrica en movimiento rotativo los convierte en una pieza fundamental para la funcionalidad de innumerables dispositivos. La simplicidad de su funcionamiento, combinada con su versatilidad y relativamente bajo costo, los hace una elección popular entre aficionados, ingenieros y fabricantes.
Este artículo se centrará en el motor dc de tamaño estándar 130, un modelo ampliamente utilizado por su equilibrio entre rendimiento, tamaño compacto y facilidad de integración. Exploraremos en detalle sus características técnicas, sus ventajas, limitaciones y las consideraciones clave para su correcta utilización, especialmente en proyectos que involucran microcontroladores como Arduino. A lo largo del artículo, proporcionaremos información práctica y consejos para ayudarle a comprender cómo este motor para arduino puede ser una pieza clave en sus futuros proyectos.
Características Técnicas del Motor DC 130
El motor dc 130 es un término general que designa a una familia de motores de dc con dimensiones y características de rendimiento relativamente estandarizadas. Si bien existen variaciones entre los fabricantes, el «tamaño 130» suele referirse a un motor con un diámetro de carcaza de aproximadamente 13 mm y una longitud de alrededor de 30 mm, aunque estas medidas pueden variar ligeramente según el fabricante. El rango de voltaje de operación típico para este motor dc se sitúa entre 4.5V y 9V, lo que lo hace compatible con una amplia variedad de fuentes de alimentación y circuitos.
El voltaje nominal de 6VDC es el voltaje al cual el motor de dc está optimizado para funcionar, proporcionando un rendimiento equilibrado en términos de velocidad y torque. Este voltaje es fácilmente accesible con fuentes de alimentación comunes o incluso con baterías. Un voltaje mayor al nominal aumentará la velocidad del motor, pero también la corriente que consume, lo que puede sobrecalentarlo y reducir su vida útil. Un voltaje menor al nominal reducirá tanto la velocidad como el torque, limitando su utilidad en aplicaciones que requieren un rendimiento significativo.
La especificación de torque de 10g/cm (gramos-centímetros) indica la capacidad del mot
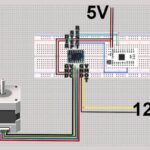
El motor dc 130 es un término general que designa a una familia de motores de dc con dimensiones y características de rendimiento relativamente estandarizadas. Si bien existen variaciones entre los fabricantes, el «tamaño 130» suele referirse a un motor con un diámetro de carcaza de aproximadamente 13 mm y una longitud de alrededor de 30 mm, aunque estas medidas pueden variar ligeramente según el fabricante. El rango de voltaje de operación típico para este motor dc se sitúa entre 4.5V y 9V, lo que lo hace compatible con una amplia variedad de fuentes de alimentación y circuitos. El voltaje nominal de 6VDC es el voltaje al cual el motor de dc está optimizado para funcionar, proporcionando un rendimiento equilibrado en términos de velocidad y torque. Este voltaje es fácilmente accesible con fuentes de alimentación comunes o incluso con baterías. Un voltaje mayor al nominal aumentará la velocidad del motor, pero también la corriente que consume, lo que puede sobrecalentarlo y reducir su vida útil. Un voltaje menor al nominal reducirá tanto la velocidad como el torque, limitando su utilidad en aplicaciones que requieren un rendimiento significativo. La especificación de torque de 10g/cm (gramos-centímetros) indica la capacidad del motor para arduino para girar una carga. Un torque más alto significa que el motor puede girar un objeto con más fuerza o superar una resistencia mayor. El torque es un factor crucial para determinar si el motor es adecuado para una aplicación específica. Por ejemplo, un motor con bajo torque puede ser suficiente para impulsar un pequeño vehículo, pero un motor con alto torque será necesario para levantar una carga pesada. La velocidad sin carga, también conocida como velocidad libre, se refiere a la velocidad a la precisión de rpm motor dc (reloaciones por minuto) a la cual el motor gira cuando no hay carga conectada a su eje. Para el motor dc 130, esta velocidad suele estar en torno a 9100 rpm. Es importante tener en cuenta que la velocidad del motor disminuirá a medida que se aplica una carga. La cantidad de disminución depende del torque requerido por la carga y la eficiencia del motor. El cuerpo del motor dc con arduino tiene unas dimensiones de 27.5mm x 20mm x 15mm, un tamaño relativamente compacto que permite su integración en espacios reducidos. El material del cuerpo suele ser plástico o metal, dependiendo de los requisitos de resistencia y durabilidad. La presencia de cables pre-soldados simplifica la conexión del motor a placas de prototipado o circuitos electrónicos, ahorrando tiempo y esfuerzo en el montaje. El correcto funcionamiento y la longevidad de un motor dc dependen críticamente de la gestión adecuada de su alimentación. Utilizar un voltaje incorrecto puede dañar el motor para arduino o reducir significativamente su vida útil. Si bien el rango de operación suele ser entre 4.5V y 9V, es crucial evitar exceder el voltaje máximo permitido por el fabricante, ya que esto puede provocar sobrecalentamiento y fallo. Al usar un motor de juguete donde comprar o cualquier otro motor dc, es importante considerar la corriente máxima que consume. Esta especificación, generalmente alrededor de 500mA para el motor dc 130, es el límite de corriente que el motor puede manejar de forma segura sin sobrecalentarse. Una corriente excesiva puede dañar el motor y los componentes del circuito de control. Para controlar la velocidad y la dirección del motor dc con arduino, es común utilizar un controlador de motor basado en un transistor o un circuito integrado especializado como un L298N. Estos circuitos permiten variar el voltaje aplicado al motor, controlando así su velocidad. También pueden proporcionar una inversión de polaridad, permitiendo cambiar la dirección de giro del motor. El uso de un microcontrolador como Arduino puede simplificar enormemente el control del motor para arduino. Arduino proporciona una interfaz sencilla para enviar comandos al controlador del motor, permitiendo crear sistemas complejos de control de movimiento. La programación en Arduino es relativamente fácil de aprender y existen numerosos tutoriales y ejemplos disponibles en línea para ayudar a los principiantes. Al conectar el motore dc 130 a un Arduino, es fundamental utilizar un controlador de motor adecuado para proteger el Arduino de los disparos de retroceso generados por el motor al desconectarse. Estos disparos de retroceso pueden dañar los pines del Arduino, provocando un mal funcionamiento o incluso un fallo completo del dispositivo. La integración del motor dc con arduino es un proceso relativamente sencillo, especialmente con la disponibilidad de librerías y ejemplos de código predefinidos. El controlador del motor se conecta al Arduino utilizando los pines digitales, y el Arduino utiliza estos pines para enviar señales de control al controlador. La librería «Stepper» de Arduino es una opción común para controlar motores de dc. Permite definir los pines de control, establecer la velocidad y la dirección del motor y enviar comandos para hacer que el motor gire un número específico de pasos. La precisión de la librería depende de la precisión del pulso del motor. Para un control más preciso de la velocidad del motor para arduino, es posible utilizar un modulación por anchura de pulsos (PWM). PWM es una técnica que consiste en variar el ancho de un pulso electrónico para simular un voltaje variable. El Arduino tiene una serie de pines de PWM que se pueden utilizar para controlar la velocidad de un motor. Al programar el motor dc 130 con Arduino, es crucial considerar el tiempo de respuesta del motor y el controlador. Es posible que sea necesario introducir retrasos en el código para permitir que el motor alcance la velocidad deseada o evite problemas de estabilidad. Además del control básico de velocidad y dirección, es posible utilizar Arduino para implementar funciones más avanzadas, como el control de posición, el control de par o el control de seguimiento de línea. Estas funciones requieren un conocimiento más profundo de los principios de control y la implementación de algoritmos más complejos. El motor dc de tamaño estándar 130 ofrece una serie de ventajas que lo convierten en una opción popular para una amplia gama de aplicaciones. Su tamaño compacto, su facilidad de integración y su bajo costo son factores clave en su atractivo. La disponibilidad de una amplia gama de controladores y recursos de programación simplifica su uso. Sin embargo, también presenta ciertas desventajas que deben tenerse en cuenta. Su eficiencia suele ser menor que la de otros tipos de motores, como los motores de pasos o los servomotores. El control preciso de la velocidad y la posición puede ser más difícil de lograr. En comparación con los motores de pasos o los servomotores, los motores dc son generalmente menos caros y requieren una menor complejidad de control. Sin embargo, los motores de pasos o los servomotores ofrecen una mayor precisión y un mayor par. Al elegir un motor de juguete donde comprar o cualquier otro tipo de motor, es importante evaluar cuidadosamente las necesidades de la aplicación y comparar las diferentes opciones disponibles. No existe un motor «perfecto» para todas las aplicaciones. El mantenimiento del motor dc 130 es relativamente sencillo y consiste principalmente en la limpieza y la lubricación periódica. El polvo y la suciedad pueden acumularse en el interior del motor, reduciendo su eficiencia y aumentando su desgaste. La lubricación ayuda a reducir la fricción y el desgaste de las partes móviles. Si el motor no funciona correctamente, lo primero que se debe hacer es comprobar la conexión de la alimentación. Asegurarse de que el voltaje es correcto y de que los cables están conectados correctamente. Si el voltaje es correcto pero el motor aún no funciona, es posible que haya un problema con el controlador del motor. Comprobar la conexión del controlador al Arduino y asegurarse de que se están utilizando los pines correctos. Si el motor gira lentamente o produce un ruido excesivo, es posible que haya un problema con el rotor o el estator. El rotor puede estar desgastado o atascado, o el estator puede estar dañado. En caso de problemas persistentes, es recomendable consultar con un técnico especializado o buscar ayuda en foros y comunidades en línea. El motor dc de tamaño estándar 130 es un componente versátil y confiable que se puede utilizar en una amplia gama de aplicaciones. Su fácil integración, su bajo costo y su relativa simplicidad lo convierten en una opción popular para los aficionados, los educadores y los ingenieros.Consideraciones de Alimentación y Control
 NEMA 17: Características, Arduino & Cómo Conectar Motor a Pasos
NEMA 17: Características, Arduino & Cómo Conectar Motor a PasosIntegración con Arduino y Programación
Ventajas y Desventajas del Motor DC Tamaño Estándar 130
Mantenimiento y Solución de Problemas
NEMA 17: Características, Arduino & Cómo Conectar Motor a Pasos Sensor Magnético Arduino: Módulo KY-003 Fácil y Barato
Sensor Magnético Arduino: Módulo KY-003 Fácil y Barato


{kind=link}